Збирання власного квадрокоптера – це надзвичайно цікавий технічний процес, який відкриває світ сучасної безпілотної авіації зсередини. Створення літального апарата власноруч дозволяє суттєво зекономити кошти та отримати глибокі знання, необхідні для подальшого обслуговування. Головне у цій справі – правильно підібрана FPV електроніка для дронів, яка надійно об’єднує всі окремі вузли в один злагоджений організм. Маючи чіткий алгоритм дій та розуміння базових принципів роботи компонентів, навіть початківець зможе успішно пройти шлях від деталей до першого впевненого старту.
Основні компоненти для конструювання квадрокоптера
Конструкція стандартного безпілотника базується на кількох ключових елементах, які повинні ідеально поєднуватися за своїми технічними характеристиками:
- Рама. Міцна карбонова основа, що бере на себе всі фізичні навантаження. Для старту найкраще підходить розмір діагоналлю п’ять дюймів.
- Силова установка. Безколекторні двигуни, що відповідають за загальну динаміку та підйомну тягу.
- Обчислювальний стек. Комплект із польотного контролера та регулятора швидкості двигунів – фактичний центр прийняття рішень системи.
- Система візуалізації. Камера та відеопередавач для миттєвої трансляції зображення на екран пілота.
- Радіокерування. Модуль приймача, який гарантує стабільний безперервний зв’язок із пультом.
{kind=link}
Підготовка необхідного інструментарію
Для якісного виконання монтажних робіт потрібно заздалегідь підготувати відповідне робоче місце та набір інструментів. Основою успішного збирання є надійна паяльна станція з можливістю точного регулювання температури. Важливо використовувати якісний флюс та припій, адже від міцності контактів залежить стабільність роботи всієї системи під впливом вібрацій. Також знадобляться пінцети, кусачки, набір шестигранних викруток для фіксації елементів на рамі та термоусадкові трубки для надійної ізоляції оголених дротів.
Покроковий процес монтажу та паяння
Збирання вимагає максимальної акуратності та концентрації уваги. Будь-яка незначна помилка у підключенні контактів може спричинити коротке замикання та незворотне пошкодження дороговартісних плат.
{kind=link}
Монтаж моторів на базу
Спочатку необхідно зібрати карбонову раму та закріпити двигуни на краях променів. Рекомендується використовувати гвинти суворо відповідної довжини, щоб вони не торкалися внутрішньої обмотки статора. Дроти живлення від моторів потрібно акуратно направити до центральної частини конструкції для подальшого паяння.
Інтеграція силової системи
Закріпіть плату регулятора швидкості у центрі рами, використовуючи спеціальні силіконові демпфери для гасіння високочастотних вібрацій. Підпаяйте фазні дроти двигунів до відповідних контактних майданчиків. Далі приєднайте основний кабель живлення з додатковим конденсатором, який надійно захищатиме електроніку від різких стрибків напруги. Після цього встановіть польотний контролер та з’єднайте обидві плати сигнальним шлейфом.
{kind=link}
Підключення периферійного обладнання
Наступним етапом є монтаж камери у передній частині рами, а відеопередавача та радіоприймача – у задній. Уважно припаяйте їхні сигнальні дроти до контролера, дотримуючись офіційної схеми розпіновки. Після перевірки контактів зафіксуйте всі модулі стяжками.
Налаштування відеозв’язку та трансляції
Окрему увагу варто приділити конфігурації системи передачі відеосигналу. Правильне налаштування частотних каналів та вихідної потужності відеопередавача є критично важливим для отримання чистого зображення. Необхідно переконатися, що антени міцно зафіксовані та не перекриваються карбоновими деталями, які можуть екранувати сигнал. Увімкнення відеопередавача без підключеної антени суворо заборонено, оскільки це призводить до миттєвого перегріву та згоряння модуля.
{kind=link}
Програмне налаштування параметрів
Після завершення механічного складання підключіть апарат до комп’ютера та відкрийте спеціалізоване програмне забезпечення. У програмі виконується оновлення мікрокоду, калібрування гіроскопа та призначення перемикачів на пульті. Обов’язково перевірте напрямок обертання кожного двигуна. Якщо ротори крутяться у неправильному напрямку, змініть цей параметр у конфігураторі, інакше апарат перевернеться під час старту.
Значення симуляторів перед реальним вильотом
Перш ніж випробовувати зібраний пристрій на вулиці, настійно рекомендується пройти тренування у комп’ютерному симуляторі. Керування від першої особи має свою специфіку та вимагає розвитку м’язової пам’яті. Практика у віртуальному середовищі дозволяє звикнути до реакції апарата, відпрацювати базові маневри та навчитися уникати перешкод без ризику розбити техніку під час перших секунд польоту.
{kind=link}
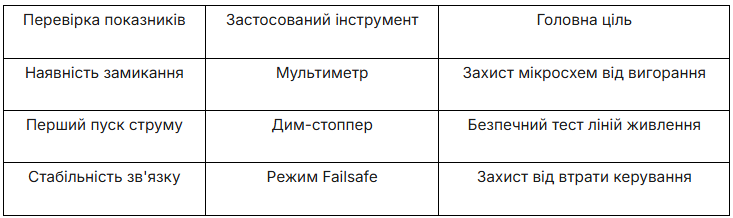
Чек-ліст безпеки перед тестуванням
Перед першим підключенням акумулятора необхідно виконати базовий контроль систем. Лопаті пропелерів встановлюються виключно перед фінальним стартом на відкритій місцевості.
{kind=link}
Від розрізнених деталей до надійного польоту
Створення безпілотника з нуля — це ґрунтовний інженерний виклик, який трансформує набір деталей в ефективний інструмент. Кожен етап збирання формує глибоке розуміння того, як саме функціонує апарат. Цей процес вимагає зосередженості, проте результат у вигляді стабільного польоту повністю виправдовує вкладені зусилля.
Опанування технічних азів дарує пілоту незалежність. Розуміння архітектури пристрою дозволяє самостійно діагностувати несправності, проводити модернізацію та адаптувати обладнання https://drono.store/ під специфічні завдання. Здобуті навички стають надійним фундаментом для розвитку та розширюють можливості використання таких систем у різних сферах діяльності.
Текст надано партнером